對于常規礦用磨機,國內外常采用的驅動方式有單邊同步電動機 + 開式齒輪副驅動、單邊異步電動機 + 減速器 + 開式齒輪副驅動、雙邊同步電動機 + 開式齒輪副驅動、雙邊異步電動機 + 減速器 + 開式齒輪副驅動等幾種。研究表明,當磨機裝機功率達到 20 MW 以上時,以上驅動方式已不再適用。根據國際公認的磨機驅動方式選用原則,裝機功率在 10 MW 以下建議選用單邊驅動;10~20 MW 建議選用雙邊驅動;20 MW 以上建議選用無齒傳動,即環形電動機直聯驅動。
對于 20 MW 以上大型礦用磨機,采用環形電動機驅動的優點是:磨機尺寸不受限制,其功率只與電動機設計能力有關,可以調速,沒有雙電動機驅動的載荷分配問題。但近些年通過對國外用戶現場應用情況調研發現,環形電動機驅動,實際應用效果并不理想,電動機和控制系統造價高昂,對環境要求極高,結構復雜,需要專業的維護團隊,備件需求量大,維護成本高,可靠性也有待提高。
相對環形電動機驅動,齒輪傳動具有明顯的技術優勢,如所需備件少、投資成本較低、結構簡單及維護方便等,另外齒輪技術經過近百年的快速發展已日趨成熟,安全可靠。因此,為適應未來大型磨機的發展需求,擺脫對環形電動機驅動的依賴,中信重工機械股份有限公司結合自身技術優勢,分別提出了四電動機雙輸入行星傳動方案和雙電動機多點嚙合齒輪傳動方案。筆者擬從傳動原理、技術特點、加工難點和經濟性等方面與原環形電動機直聯驅動方案進行對比,探討兩種齒輪傳動方案的可行性,為新一代大型磨機驅動提供新的解決方案。
1 傳動方案及原理
針對提出的四電動機雙輸入行星傳動方案和雙電動機多點嚙合齒輪傳動方案,現以
φ12.2 m×8.8 m 半自磨機為例分別進行介紹。已知磨機基本技術參數如表 1 所列。
表 1 磨機基本技術參數
1.1 四電動機雙輸入行星傳動
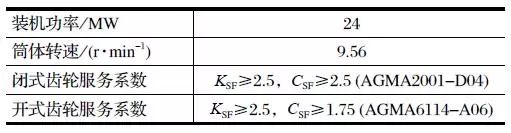
如圖 1 所示,
φ12.2 m×8.8 m 半自磨機主傳動采用雙邊異步電動機 + 雙輸入行星減速器 + 開式齒輪傳動方案。其中,電動機與行星減速器采用高彈性聯軸器聯接,行星減速器與開式齒輪軸組采用齒式聯軸器聯接,主傳動開式齒輪軸組另一端與慢速驅動裝置聯接。
1. 異步電動機 2. 高速聯軸器 3. 雙輸入行星減速器 4. 齒式聯軸器 5. 開式齒輪軸組 6. 齒圈 7. 慢速驅動裝置 8. 磨機本體
圖 1 四電動機雙輸入行星傳動方案
磨機主傳動單電動機功率 6 MW,單邊驅動為雙電動機輸入經行星減速器單軸輸出,然后通過開式齒輪軸組驅動齒圈,單邊驅動功率 12 MW,雙邊總傳遞功率 24 MW。該傳動方案大幅度降低了電動機的單機功率,解決了大功率電動機采購成本高、生產周期長的問題;通過精確的電氣控制技術,可滿足雙邊四電動機驅動的同步性和均載性要求,并確保雙邊驅動平均負載不均衡系數小于 2%。當主機功率不太大時,也可將雙邊 (四電動機) 驅動改為單邊 (雙電動機) 驅動。該傳動方案具有較寬的功率覆蓋范圍。
1.2 雙電動機多點嚙合齒輪傳動
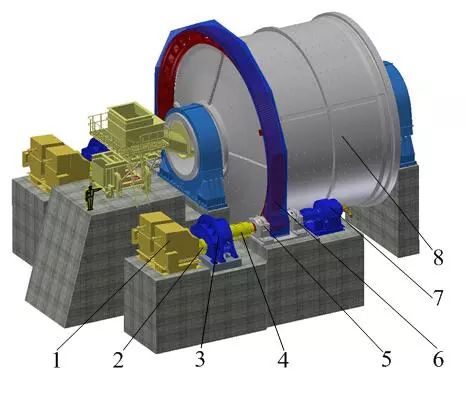
如圖 2 所示,
φ12.2 m×8.8 m 半自磨機主傳動采用雙邊同步電動機 + 多點嚙合減速器 + 齒圈傳動方案,單邊驅動單元傳遞功率 12 MW。其中,電動機與多點嚙合減速器采用力矩限制聯軸器聯接,減速器與開式齒圈直接嚙合驅動磨機轉動。另外,力矩限制聯軸器設置有制動盤,配備制動器,可用于更換襯板時的制動及運行過程中的緊急制動。
1. 同步電動機 2. 制動器 3. 力矩限制聯軸器 4. 多點嚙合減速器 5. 齒圈 6. 磨機本體
圖 2 雙電動機多點嚙合傳動方案
雙電動機多點嚙合齒輪傳動,電動機功率相對較低,采購成本低;通過電氣控制技術保證雙邊驅動功率不均衡系數小于 2%,同時多點嚙合減速器內部設有機械柔性均載機構,保證嚙合點均載;多點嚙合減速器與齒圈直接嚙合,取消了開式小齒輪軸組,結構更加簡潔;取消了慢驅傳動裝置,通過變頻控制技術可實現磨機的低速大轉矩驅動;采用多點嚙合技術,單邊驅動功率可達 19 MW,雙邊驅動功率可達 38 MW,能夠保證磨機有較高的裝機功率。
2 技術特點
2.1 四電動機雙輸入行星傳動
多電動機驅動是解決特大型磨機驅動的主要方法之一,在多電動機精確控制技術的推動下,在礦山、石油化工及軌道交通等領域得到了廣泛應用。四電動機雙輸入行星傳動方案具有以下技術特點:
(1) 將常規平行軸單輸入、單輸出減速器更改為雙輸入、單輸出行星齒輪傳動,降低了電動機單機功率,縮小了減速器體積,具有較高的功率密度。
(2) 各驅動單元的聯接均采用柔性聯接方式,即電動機與減速器間的棒銷聯軸器,減速器與小齒輪軸組的鼓形齒聯軸器,使得各傳動單元能夠相對獨立,減小了電動機和主機動態載荷對減速器的影響。
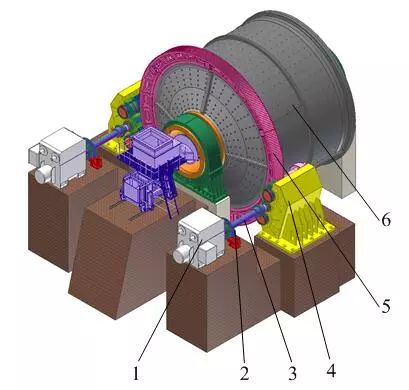
(3) 如圖 3 所示,雙輸入、單輸出行星減速器采用兩級傳動:第一級為雙輸入平行軸傳動,將動力傳遞給二級太陽輪;第二級采用內齒圈輸出,避免行星輪及行星轉架不平衡力矩產生較大的動態載荷而影響齒輪及軸承壽命。
1. 輸入小齒輪 2. 一級大齒輪 3. 二級行星齒輪 4. 二級太陽輪 5. 輸出內齒圈
圖 3 雙輸入行星減速器
(4) 雙輸入行星減速器輸出內齒圈采用薄壁把合式結構,通過內齒圈與輸出軸的彈性變形改善齒面接觸,提高行星齒輪傳動的均載性能。
(5) 根據 AGMA6114-A06 對磨機開式齒輪服務系數的最小要求,四電動機雙輸入行星傳動受開式齒輪軸組承載能力的限制,單邊最大傳遞功率建議不超過 12 MW,雙邊最大傳遞功率建議不超過 24 MW。
2.2 雙電動機多點嚙合齒輪傳動
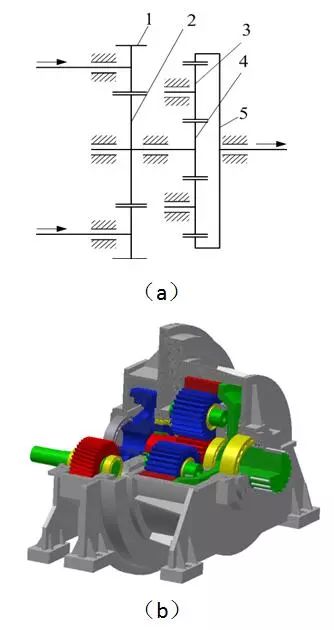
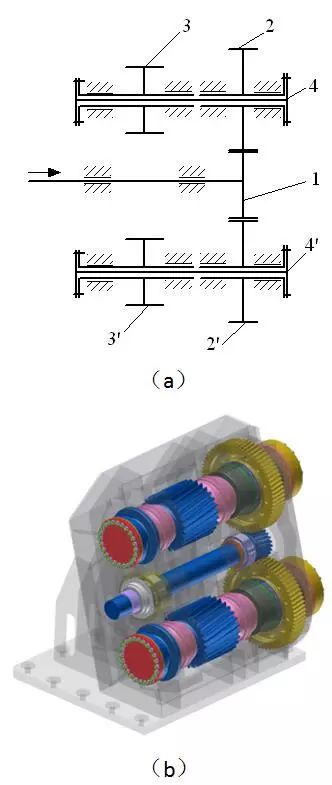
大型磨機雙電動機多點嚙合齒輪傳動系統打破了常規磨機齒輪驅動形式 (見圖 4),動力由輸入小齒輪輸入,輸入小齒輪與兩個一級大齒輪嚙合進行功率分流,一級大齒輪與輸出小齒輪軸通過扭力軸組聯接,最后,兩個輸出小齒輪軸通過與大齒圈嚙合實現功率合流和磨機驅動。該傳動方案具有如下特點:
1. 輸入小齒輪 2, 2′. 一級大齒輪 3, 3′. 輸出小齒輪軸 4, 4′. 扭力軸組
圖 4 多點嚙合齒輪減速器
(1) 經對各傳動單元的分析計算,該方案可實現大型磨機的驅動;
(2) 多點嚙合齒輪箱采用平行軸功率分流傳動方式,結構簡單,加工方便;
(3) 采用柔性支承瓦技術,安裝維護方便,具有較高的承載能力和可靠性;
(4) 采用扭力軸均載技術,解決了雙路受載不均的問題;
(5) 多點嚙合齒輪箱設計了多種彈性補償機構,對零部件的加工誤差、產品現場安裝誤差不敏感,具有良好的自適應性;
(6) 電動機單機功率 12 MW,相對環形電動機,采購成本大幅度降低,技術成熟,維護方便;
(7) 傳動系統取消了小齒輪軸組,縮短了傳動鏈,提高了可靠性;
(8) 設置了力矩限制聯軸器和閘控系統,可實現傳動系統的過載保護和緊急制動;
(9) 雙電動機雙邊多點嚙合傳動,傳遞功率大,具有較大的功率拓展性,保守估計雙邊傳遞功率可達 38 MW 以上。
綜上所述,雙電動機雙邊多點嚙合傳動具有良好的傳動性能和可靠性,完全可以替代大型磨機環形電動機驅動方案,具有較高的可實施性及經濟性。
3 加工要求
隨著磨機的大型化,齒輪傳動裝置的承載能力明顯提高,對齒輪傳動裝置的體積、質量、加工精度、關鍵零部件的機械性能及可靠性等,均提出了較高的要求,故在關鍵零部件加工過程中需應用如下關鍵技術:
(1) 大型滲碳淬火齒輪精密加工技術,如 DIN 標 5 級精度齒輪的加工、齒面有效硬化層厚度均勻度控制及磨削缺陷的消除等;
(2)
φ10 m 及以上開式齒圈高質量制造技術,如百噸級超重齒圈的鑄造及機械加工、Q10~Q9 級(AGMA2000) 精度輪齒加工、開式齒圈機械加工殘余應力及變形控制等;
(3) 齒輪材料熱處理精細控制技術,如窄淬透帶高性能齒輪鋼冶煉、熱處理殘余應力的消除與變形控制、滲碳層的精確控制、齒輪和軸等零部件機械性能的精確控制等;
(4) 大型齒輪精密修形技術,如閉式齒輪全齒面磨齒修形、開式齒輪梳齒修形等;
(5) 大型焊接箱體變形控制技術等。
4 成本及經濟性分析
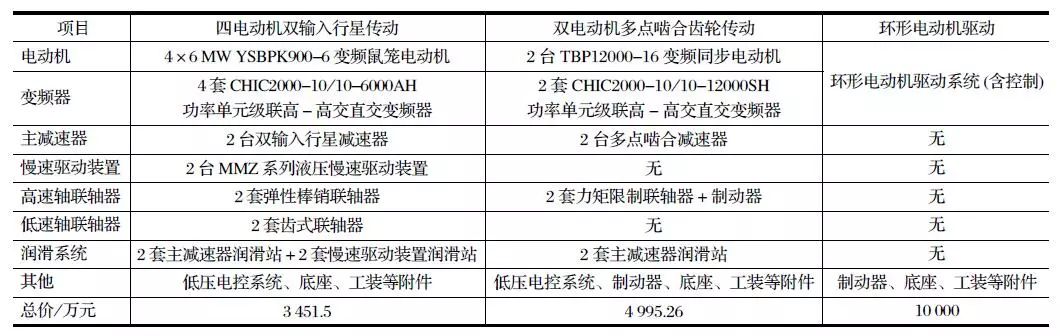
針對 20 MW 級大型磨機驅動方案,以
φ12.2 m× 8.8 m 半自磨機為例,對四電動機雙輸入行星傳動、雙電動機多點嚙合齒輪傳動及環形電動機驅動方案進行成本分析,這 3 種傳動方案的機械和電控液壓系統配置及造價對比如表 2 所列。由表 2 可知,四電動機雙輸入行星傳動造價最低,雙電動機多點嚙合齒輪傳動造價居中,環形電動機驅動方案價格遠高于前兩種方案。
表 2 φ12.2 m×8.8 m 半自磨機驅動方案配置及造價對比
以上研究表明,四電動機雙輸入行星傳動體積小,功率密度高,具有較高的承載能力,采用雙邊異步電動機 + 減速器 + 開式齒輪副驅動方案,現場安裝調試和日常維護技術成熟;但由于主減速器采用行星傳動,一旦出現故障,需要返廠維修,故為保證可靠性,對其加工裝配質量的要求較高。另外,受限于開式小齒輪軸組承載能力,經核算,該傳動方案傳遞功率建議不超過 24 MW。
雙電動機多點嚙合傳動的主減速器為功率分流平行軸傳動,單邊兩點嚙合,承載能力高;采用誤差彈性補償機構,對現場安裝調試要求較低;大量采用滑動軸承,提高了支撐剛度和承載能力,保證了減速器的平穩可靠運行。另外主減速器結構簡單,現場維修方便。
環形電動機驅動可根據磨機要求進行設計,實現大功率恒速、變速驅動,傳動鏈短,理論上具有較高的可靠性;但電動機轉子和定子之間采用復雜的水和空氣密封裝置,需要專業的維護團隊,電動機控制系統對環境要求較高,備件多,適用于資金充足、技術水平較高的用戶。
5 結語
針對 20 MW 以上大型磨機傳動系統,分別提出了四電動機雙輸入行星傳動方案和雙電動機多點嚙合齒輪傳動方案,并從傳動原理、技術特點、加工難點和經濟性等方面進行了對比分析論證。分析結果表明,這兩種方案均可實現 20 MW 以上大型磨機驅動,與環形電動機驅動相比,維護保養簡單,技術成熟,可靠性高,且具有明顯的價格優勢。